
Using the CiA 402 Drive Profile for Motion Control Applications



The CAN in Automation (CiA) group has created unique device specifications for certain applications. One example we’ve highlighted is CiA 417, which defines the CANopen Lift Application. Another is CiA 402, which defines the specification for devices that operate motors. This can include VFDs, Servo Drives, stepper drives, etc.
This post gives an overview of some of the main features of CiA 402, why a person would want to use it, and some considerations.
CiA402 – A Profile for Drives and Motion Control
The CAN bus protocol has succeeded since its initial creation for automotive applications. Over time, the number of vendors offering CAN products has increased along with the many applications that use the protocol.
This has given rise to the need to create specifications for certain applications. Specifications help with interoperability and allow products to be more easily swapped out. They also help reduce development times by creating a common template.
The CiA 402 (also referred to as DS402) profile was created for motion controllers, VFDs, and servo drives that are operating motors. Here are a few important features of the DS402 profile.
Basic Definitions
CiA 402 defines some basic parameters. This includes identification parameters such as Vendor IDs, Product Codes, Serial Numbers, Fault codes, etc.
Other parameters are related to the motor type (stepper, AC servo), and nameplate information, such as Motor rated current, and Motor rated speed.
Other parameters exist that are operating mode-specific (more info on modes further on). Example mode parameters include Target Torque, Max Torque, Max motor speed, etc.
These basic defined parameters function similarly to EtherNet/IP’s AC Drive Profile. The idea is that the commonly used and required data is defined upfront. Also, the hex addresses for those parameters are defined and fixed. So this basic information from Vendor A and Vendor B will be presented similarly.
Control & Status Words
The CiA 402 profile also defines the structure of the control and status words. The control word contains essential information such as: Enable voltage, Quick stop, Enable Operation, and Fault Reset.
The status word provides information that is sent from the drive device back to the controller. The status word contains information like Fault, Voltage Enabled, Warning, etc.
Both the control and status words leave bits open so they can be defined by the manufacturer. This gives the device manufacturer some flexibility to implement custom functions.
State Machine
The DS402 profile includes a state machine. The state machine covers the various states a drive can be in. These states include SWITCHED ON, FAULT, OPERATION ENABLE, etc…
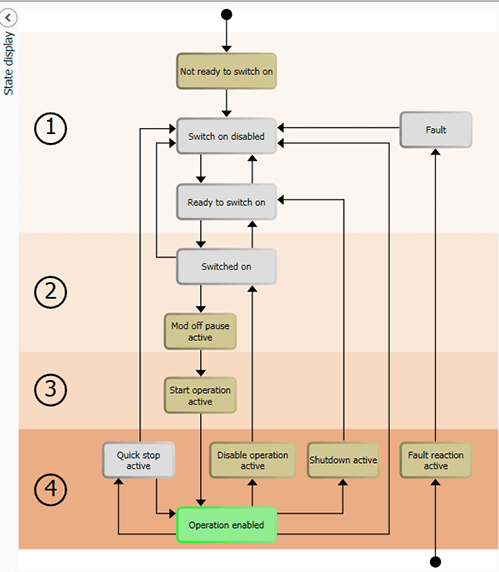
The drive’s state can be changed by the master controller over the control word. Or the state can also be changed in reaction to an event (e.g., fault).
In turn, the drive’s current state is returned to the controller via the statusword. In this way, the master control can monitor all drive axes in the case of multi-axis motion applications.
It is important to note that a drive must proceed through the state diagram logically. Therefore, if a person wants to start up a drive and spin a motor, then the drive must logically progress through a series of states until they reach the OPERATION ENABLE state.
Similarly, if the drive enters a fault state, it cannot be immediately run again. Rather, the fault must be cleared by first going into a FAULT RESET state – this can be done over the controlword.
Operating Modes
CiA 402 outlines basic operating Modes used in motion control applications. These Modes include Profile Positioning Mode, Velocity Mode, Torque Mode, Homing Mode, etc.
One important thing to note is that a vendor that says they comply with the CiA402 profile might meet parts of the standard but not the entire specification. You should always verify with the device vendor if their product meets the specific functionality you are looking to implement.
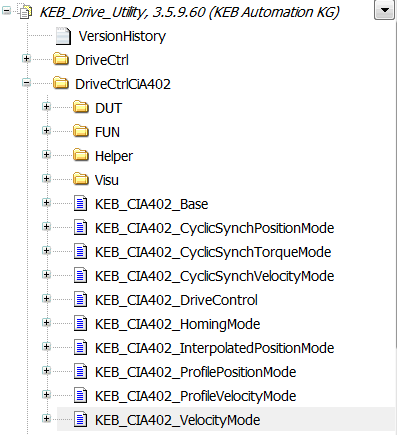
For example, KEB drives like the S6 support the following modes: Profile Position, Velocity, Homing, Cyclic Sync Position, Cyclic Sync Velocity, and Homing modes. However, not all 30+ homing routines outlined in the 402 specifications are supported. The most common ones are, but the special-case ones are not.
CANopen over EtherCAT (CoE)
Where does the CiA402 profile fit in with EtherCAT? EtherCAT supports the CiA402 device profile through CANopen over EtherCAT (CoE). EtherCAT also supports other CANopen device profiles like CiA 406 (encoder profile) and CiA 408 (hydraulic device profile).
The CoE functionality is defined by the EtherCAT Technology Group (ETG.6010) and allows the DS 402 profiles to be mapped to EtherCAT. The EtherCAT and CAN state machines are similar enough, with a few small exceptions.

As standard, KEB 6th generation drives like the S6 EtherCAT servo drive include hardware to support both CAN and EtherCAT – customers can choose what they want to use.
KEB Software Tools
KEB has a lot of nice tools on the controller and drive-side that will help a user set up the CiA402 profile and CoE.
An engineer could use the many PLCopen function blocks and create their own function block for CiA402 control. However, this has already been done for you by KEB engineers.
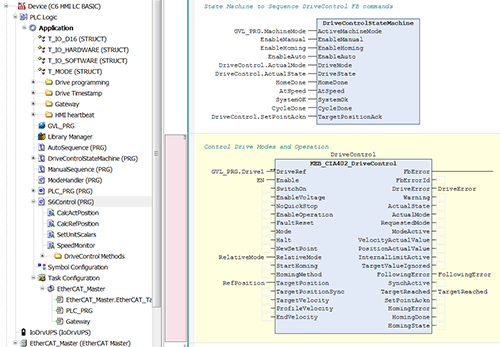
For our controls products, a function block called KEB_CIA402_DriveControl is included in Combivis Studio 6. The function block includes all the necessary inputs to spin the motor and control through the various supported operating modes.
Combivis includes a nice wizard with a graphical interface on the drive side. The graphical interface allows a user to see the current machine state the drive is in. The user can also give inputs through the software to progress the drive through the states. This is great for troubleshooting and basic start-ups.

Conclusion
CiA 402 gives a machine builder flexibility. KEB offers many compatible drive solutions for stepper, AC servos, and multi-axis applications. We also offer software tools to help develop and optimize your machine.
Are you interested in CiA402 or CoE drives? Complete the form below to connect with a KEB engineer today to discuss our CiA402 drive options.
Related Articles

Let's Work Together
Connect with us today to learn more about our industrial automation solutions—and how to commission them for your application.